|
A Discrete-Event Network Simulator
|
API |
|
|
A Discrete-Event Network Simulator
|
API |
Classes | |
| class | InformationWindow |
| class | Link |
| class | NetDeviceTraits |
| class | PyVizObject |
Variables | |
| dictionary | netdevice_traits |
| float | PIXELS_PER_METER = 3.0 |
| dictionary | plugin_modules = {} |
| list | plugins = [] |
| plugins_loaded = False | |
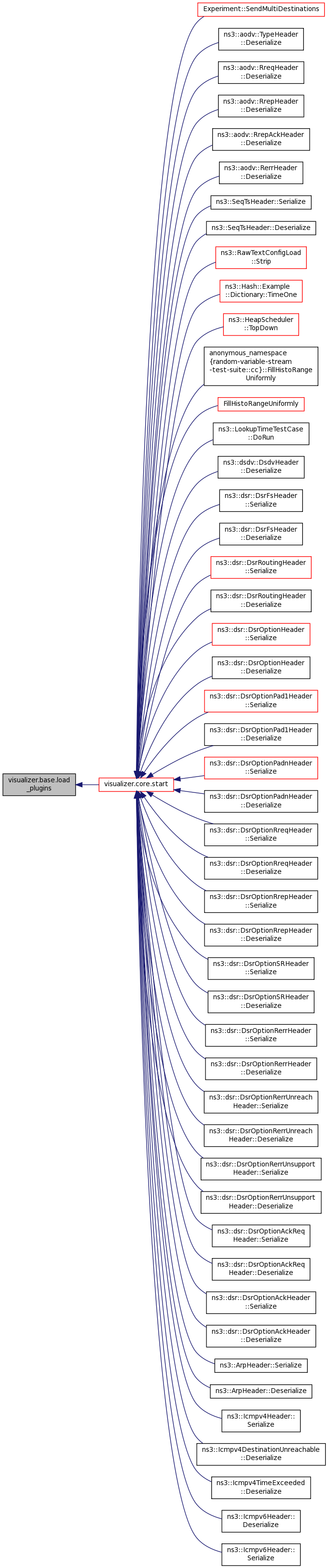
| def visualizer.base.load_plugins | ( | ) |
Definition at line 93 of file base.py.
References list, and visualizer.base.register_plugin().
Referenced by visualizer.core.start().
 Here is the call graph for this function: Here is the caller graph for this function:
Here is the call graph for this function: Here is the caller graph for this function:| def visualizer.base.lookup_netdevice_traits | ( | class_type | ) |
Definition at line 50 of file base.py.
Referenced by visualizer.core.Visualizer.scan_topology().
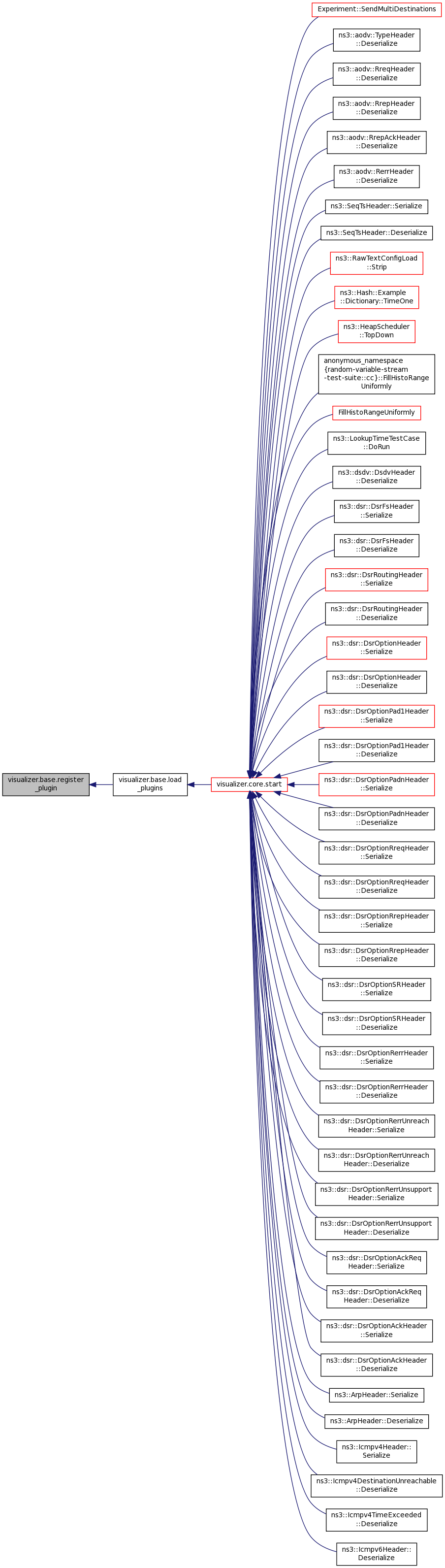
Here is the caller graph for this function:| def visualizer.base.register_plugin | ( | plugin_init_func, | |
plugin_name = None, |
|||
plugin_module = None |
|||
| ) |
Register a plugin. @param plugin: a callable object that will be invoked whenever a Visualizer object is created, like this: plugin(visualizer)
Definition at line 80 of file base.py.
Referenced by visualizer.base.load_plugins().
Here is the caller graph for this function:| def visualizer.base.transform_distance_canvas_to_simulation | ( | d | ) |
Definition at line 68 of file base.py.
Referenced by visualizer.core.Visualizer.node_drag_motion(), and wifi_intrastructure_link.WifiLink.tooltip_query().
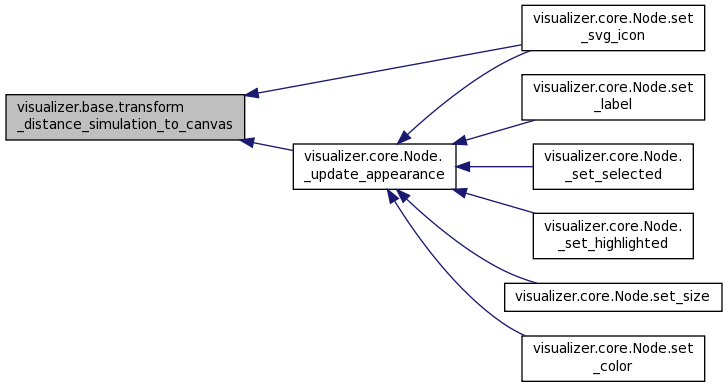
Here is the caller graph for this function:| def visualizer.base.transform_distance_simulation_to_canvas | ( | d | ) |
Definition at line 62 of file base.py.
Referenced by visualizer.core.Node._update_appearance(), and visualizer.core.Node.set_svg_icon().
Here is the caller graph for this function:| def visualizer.base.transform_point_canvas_to_simulation | ( | x, | |
| y | |||
| ) |
| def visualizer.base.transform_point_simulation_to_canvas | ( | x, | |
| y | |||
| ) |
Definition at line 65 of file base.py.
Referenced by visualizer.core.Visualizer._update_node_positions(), visualizer.core.Visualizer.node_drag_motion(), visualizer.core.Visualizer.scan_topology(), and visualizer.core.set_bounds().
Here is the caller graph for this function:| dictionary visualizer.base.netdevice_traits |
| list visualizer.base.plugins = [] |
Definition at line 77 of file base.py.
Referenced by ns3::dot11s::PeerManagementProtocol.Report(), and ns3::dot11s::PeerManagementProtocol.ResetStats().
 1.8.6
1.8.6