RoutesMobilityModel: Difference between revisions
No edit summary |
|||
| Line 36: | Line 36: | ||
= Code repository = | = Code repository = | ||
My code can be found [https://bitbucket.org/TiagoCerqueira/routesmobilitymodel | My code can be found here: https://bitbucket.org/TiagoCerqueira/routesmobilitymodel | ||
Additionally, the user can also download a [https://bitbucket.org/TiagoCerqueira/routesmobilitymodel/downloads/mobility-service-interface.tar.gz stable release of the module]. | |||
= Current implementation = | = Current implementation = | ||
Revision as of 13:45, 23 September 2015
Main Page - Roadmap - Summer Projects - Project Ideas - Developer FAQ - Tools - Related Projects
HOWTOs - Installation - Troubleshooting - User FAQ - Samples - Models - Education - Contributed Code - Papers
Overview


Mobility trace generation in ns-3 is done either by using the Mobility module included in NS-3 or by importing mobility traces generated by third party programs in a compatible format. The Mobility module included in ns-3 gives programmers the building blocks to create simple or complex traces, but is hindered by the fact that creating complex traces using the current module alone takes too long, even for simulations with just a couple of mobility capable nodes. As for mobility traces generated by third party programs, such as SUMO, they can involve too much work for their generation, especially when the researcher's interest - and expertise - is more on the data communication than on the traffic simulation. Using the Google Maps API it is possible to generate complex mobility traces, simply by providing a start and end point.
The RoutesMobilityModel generates realistic mobility traces by querying the Google Maps Directions API and requesting directions between two (or more) points. The information obtained from the Google Maps services, used in tandem with the ns3::WaypointMobilityModel, allows the simulator to generate realistic mobility traces based on real-world locations and road networks. The purpose of this module is to bridge the gap between the highly complex but realistic SUMO and the synthetic mobility models available in ns-3.
This module was developed during the Summer Mentorship Program of 2014.
The RoutesMobilityModel module relies on the module ns3::WaypointMobilityModel in order to import the mobility routes retrieved from the external information services. Our module creates ns3::Waypoints that model the routes used to travel between two (or more) real world locations, and later on they are interpreted as the waypoints the vehicles move through during the simulation.
The Google Maps Directions service provides an XML that contains the following concepts:
- Leg - A Leg is a list of Steps. Legs only occur if the user specifies a Waypoint (A to B, passing through C)
- Step - A Step contains Points encoded in a polyline
- Point - A latitude/longitude set
The information retrieved from the Google Maps Directions API contains, among other information, a polyline for each step of the route requested. It also contains the duration (the time it would take to go from the beginning to the end) for the step. The module decodes the polyline, thus creating a list of geographical coordinates, which are, in turn, converted to Cartesian coordinates. In order to model the speed of a node, implemented by setting the times for the ns3::Waypoints, we distributed the duration of the step in proportion to the distance traveled between two waypoints.
This module empowers the user to generate realistic mobility traces for entire node containers, using different transportation methods (driving, walking, cycling and public transportation), with little to no effort.

The image above depicts a simple use case of this module, the generation of mobility trace for a single node.
The module described in this page provides an interface to convert information from a travel planning service. Currently, only the Google Maps services are implemented however the module was built in order to accommodate different travel planning services, such as OpenStreetMaps, and locations databases. To this end, the Strategy software design pattern was used in the module design.
Documentation
This module has been documented using Doxygen and UML. The UML diagrams for the current release are shown below. Additional documentation was created using sphynx, which documents the module in further detail. This documentation will be available in the ns-3 models documentation once the module is released.
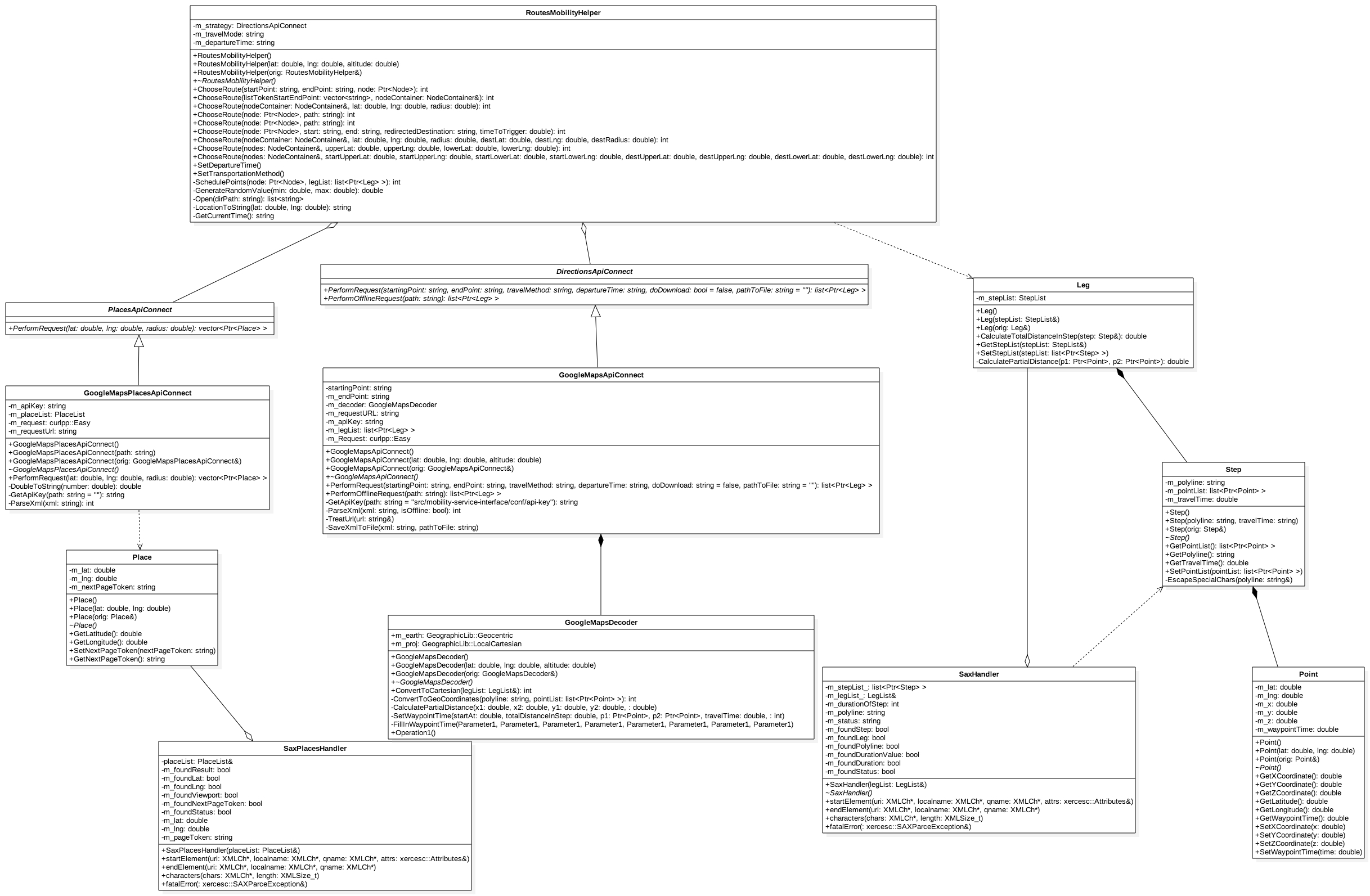
Class diagram
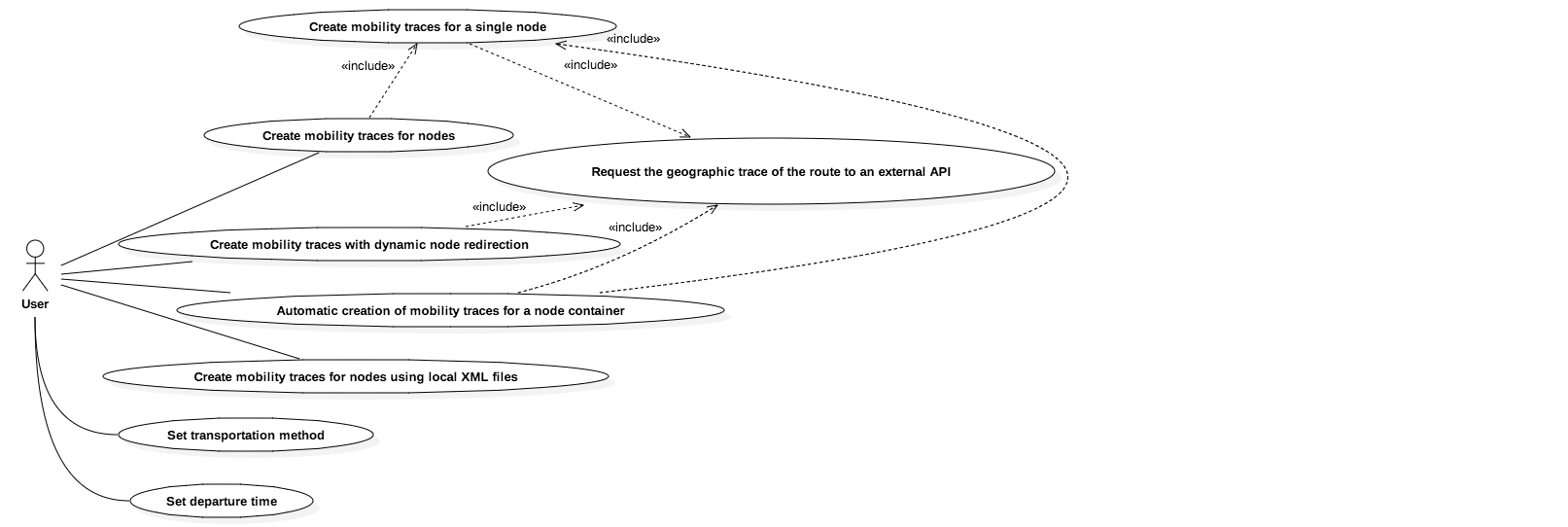
Use Case diagram
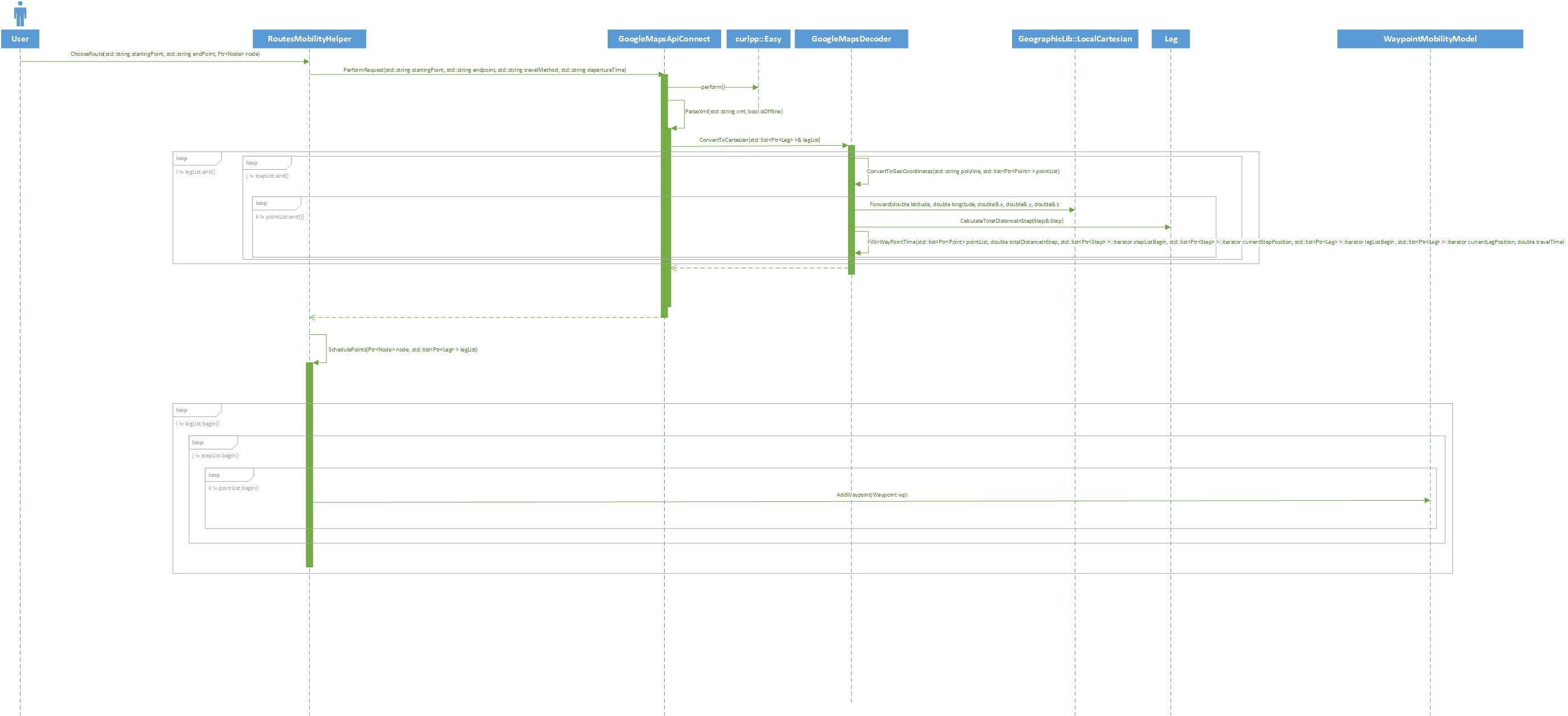
Sequence diagram for the "Create mobility trace for a single node" use case
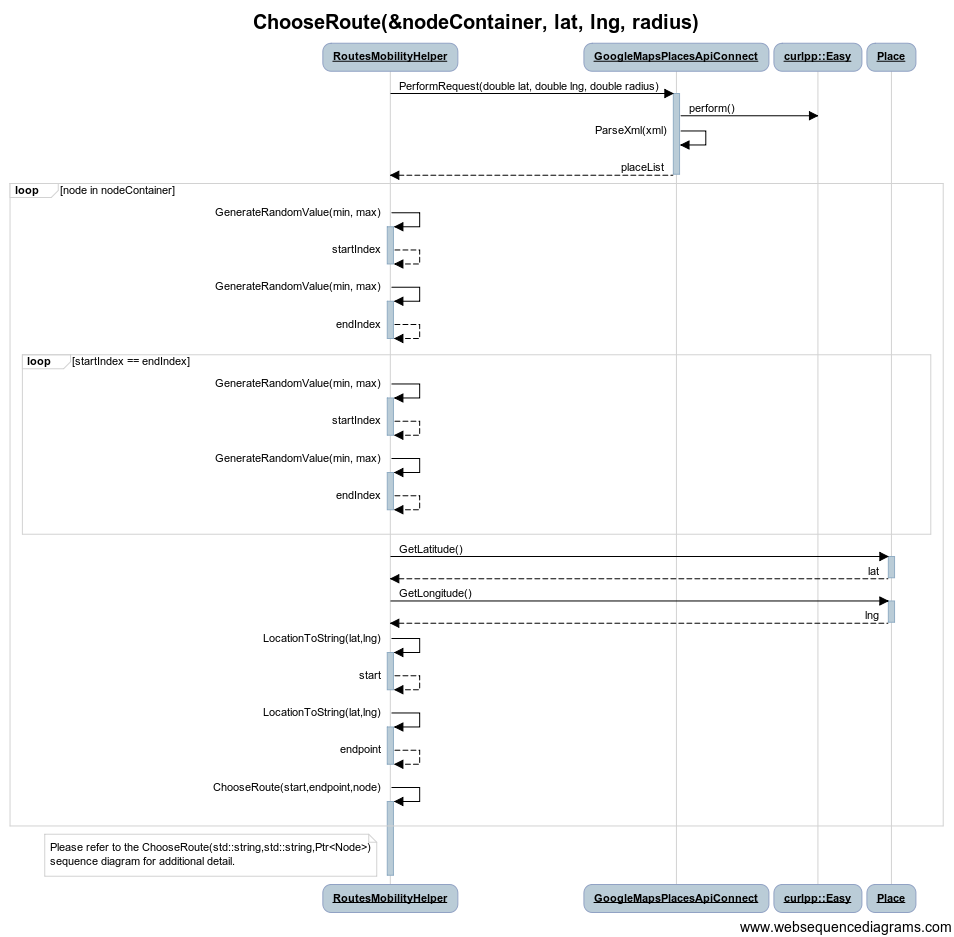
Sequence diagram for the "Automatic creation of mobility traces for a node container" use case


.png)
Code repository
My code can be found here: https://bitbucket.org/TiagoCerqueira/routesmobilitymodel
Additionally, the user can also download a stable release of the module.
Current implementation
Features
- Capable of generating mobility for single nodes or for entire node containers without size restriction
- Allows the user to select different methods of transportation for the mobility traces (driving, walking, cycling and public transportation
- Allows the user to specify a departure time
- Is capable of generating mobility online, by contacting the Google Maps API, or offline, by importing cached responses in the filesystem. The Google Maps APIs ToS states that the users must not cache the response data for more than 30 days. Doing so is a direct violation of the ToS
Limitations
This module possesses a couple of limitations:
- Currently, no proper serialization is implemented and, hence, it's not possible to run the exact same mobility between simulations
- The module takes a long time to parse XML responses. This effect is only felt when dealing with large node containers (300+ nodes).
- No bidirectional coupling between data layer and the mobility, which means that the data communications do not affect the mobility
- Traffic information is only available with the paid version of the Google Maps Places API
Dependencies
This module is dependent of the following libraries:
- libcurlpp
- Xerces-C++
- GeographicLib
Tests
In order to provide the users with a reliable module, the team developed a test case to test for the time placement of waypoints and the conversion between geographical and cartesian coordinates. The code is available in the examples folder of the module.
Examples
Three examples are provided, available under the examples folder of the module:
- routes-mobility-example.cc - This example illustrates basic usage of this module, generating mobility for a few nodes
- routes-automatic-example.cc - This example shows the user how to generate mobility for entire node containers, by specifying a real-world area to generate mobility.
- routes-offline-example.cc - This example illustrates how a user can load travel planning information previously downloaded.
Future Work
- Implementation of proper serialization is one of the team's top priorities and should be included in the next release. This will empower users to repeat simulations using the same mobility.
- Implementing bidirectional coupling is another goal of the team, however, it will require further study to implement.